
exact and trajectory controllability
Showing the single result

Recently posted
-
 An Inertial Method for Approximating Solutions of Split Equality Problems for Generalized Mixed Equilibrium and Fixed Points of Multi-Valued Mappings in Banach Spaces
An Inertial Method for Approximating Solutions of Split Equality Problems for Generalized Mixed Equilibrium and Fixed Points of Multi-Valued Mappings in Banach Spaces
-
 Structural Characterizations of Soft Dimodules
Structural Characterizations of Soft Dimodules
-
 Group with double operators
Group with double operators
-
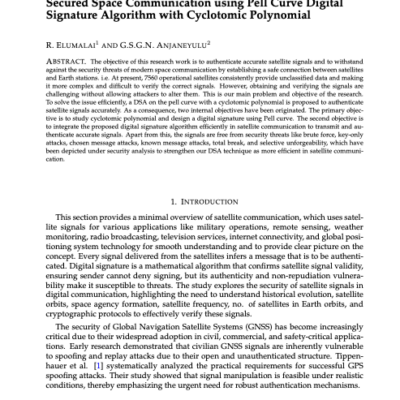 Secured Space Communication using Pell Curve Digital Signature Algorithm with Cyclotomic Polynomial
Secured Space Communication using Pell Curve Digital Signature Algorithm with Cyclotomic Polynomial
-
 Generalized Density Convergence
Generalized Density Convergence
-
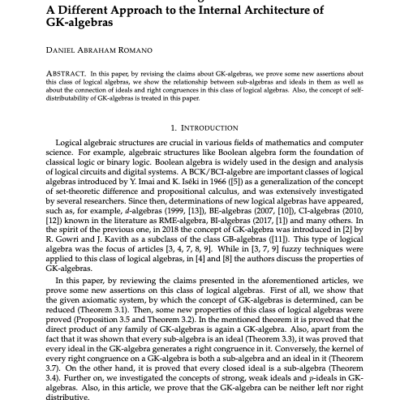 Some New Results on GK-algebras. A Different Approach to the Internal Architecture of GK-algebras
Some New Results on GK-algebras. A Different Approach to the Internal Architecture of GK-algebras
-
 Positive solutions to higher order fractional boundary value problems with non-homogeneous conditions
Positive solutions to higher order fractional boundary value problems with non-homogeneous conditions
-
 Further Study on the s-Shunt Intersection Graph of a Graph
Further Study on the s-Shunt Intersection Graph of a Graph
-
 Existence, Uniqueness and Stability Analysis of Solutions for a ψ-Caputo Fractional Spatial Heterogeneous Viral Infection Model
Existence, Uniqueness and Stability Analysis of Solutions for a ψ-Caputo Fractional Spatial Heterogeneous Viral Infection Model
-
 Automorphisms and Structural Properties of Cayley Graphs on Matrix Monoids
Automorphisms and Structural Properties of Cayley Graphs on Matrix Monoids